上海交通大学谷国迎教授、江西科技师范大学卢宝阳教授团队《Advanced Materials》:用于软机器的高拉伸性、超低滞后导电聚合物水凝胶应变传感器
近日,课题组在国际顶尖期刊Advanced Materials(IF=32.086,JCR: Q1区,中科院1区Top)在线发表题为“High-stretchability, Ultralow-hysteresis Conducting Polymer Hydrogel Strain Sensors for Soft Machines”的研究论文,上海交通大学博士生沈泽群为第一作者,课题组2020级分析化学专业硕士生张志琳同学为共同第一作者,谷国迎教授、卢宝阳教授为该论文的通讯作者。
由柔性可拉伸材料制成的应变传感器在电子皮肤和软机器人领域是至关重要的一项技术。目前,新一代的应变传感器可集成高拉伸性、快速响应以及在非结构化环境中出色的可重复性,这些性能提高了应变传感器的交互顺应性和监测精确性。基于各种类型的柔性功能材料,人们已经开发出了基于导电纳米材料、水凝胶和液态金属的应变传感器原型设计方案。其中,导电聚合物水凝胶因为能够提供离子和电子导电性,并且具有固有的可拉伸性、稳定的导电性、生物相容性和机械稳健性等特有优势,因此成为了应变传感器的候选材料。最近的研究报道了一些基于柔性导电聚合物水凝胶的应变传感器,可以在物理应变下实现灵敏的电响应。例如,通过将聚(3,4-乙烯二氧噻吩):聚(苯乙烯磺酸盐)(PEDOT:PSS)与聚氨酯(PU)的溶液混合,然后在表面覆盖碳纳米管涂层,研究人员开发了一种可以检测人的面部表情的应变传感器。然而,由于刚性导电聚合物的固有局限性,目前报道的器件通常具有较低拉伸性能。尽管最近在提高弹性体基质的可拉伸性方面取得了进展,但由于粘弹性弹性体在循环拉伸下的不可逆能量耗散,高度可拉伸的导电聚合物水凝胶应变传感器仍存在高滞后现象。此外,目前的应变传感器在无约束条件下工作时,通常对诸如扭曲和挤压等离轴变形的干扰很敏感。这些限制严重阻碍了它们在具有大变形范围的多功能柔性机器人系统中的实际应用。截至目前,开发一种机械稳健的导电聚合物水凝胶应变传感器,能同时兼顾高拉伸性和超低滞后性能,仍然是一个重大的挑战。
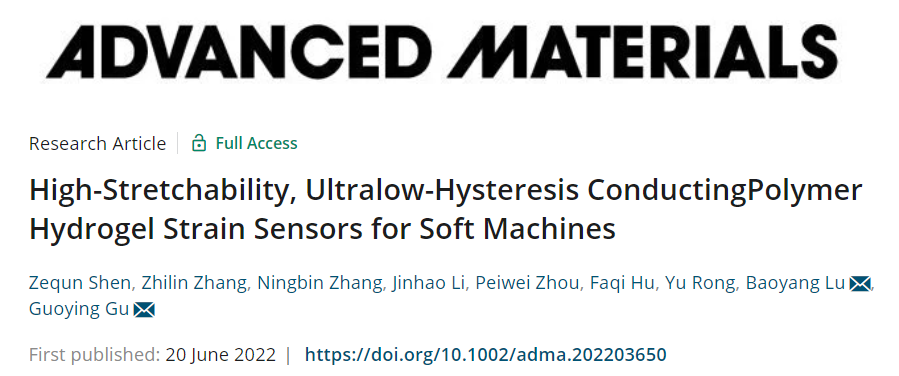
鉴于此,上海交通大学谷国迎教授、江西科技师范大学卢宝阳教授团队开发了一种基于导电聚合物水凝胶的高度可拉伸(300%)、超低滞后(<1 .5%)的应变传感器,用于可穿戴皮肤和软机器人(图 1a)。作者通过简单的一步合成方法,将PEDOT:PSS纳米纤维与聚乙烯醇 (PVA) 相结合,构建了独特的微相半分离导电聚合物水凝胶网络。该材料可通过直接墨水书写(DIW)3D打印和连续冻融来进行量产制造。该应变传感器具有高线性度、高机械循环稳定性以及抵抗诸如扭转和压力等离轴变形的内在鲁棒性。该项工作为具有增强传感功能的导电聚合物水凝胶和可拉伸电子皮肤及智能机器人系统提供了技术平台。
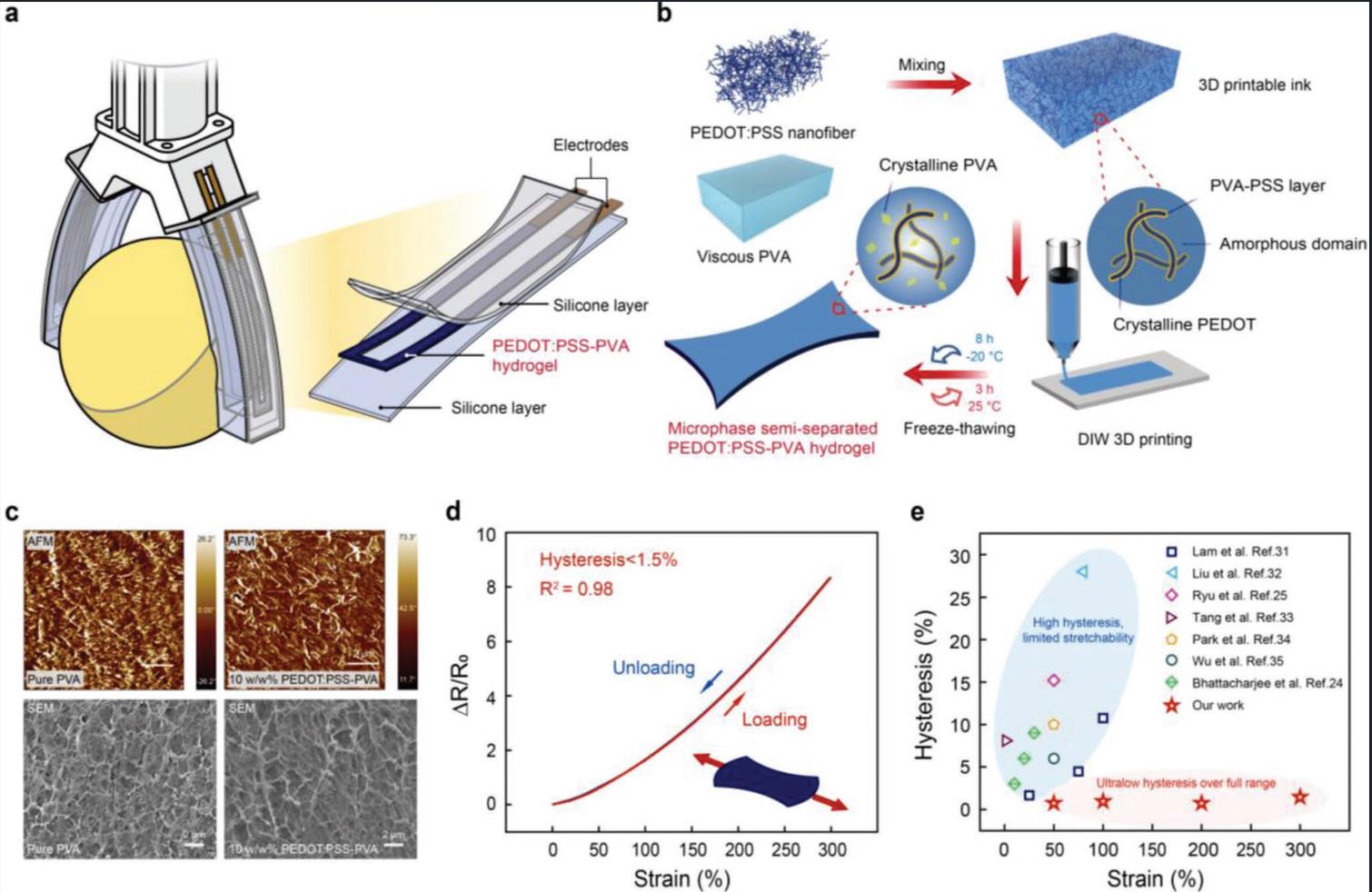
图1. PEDOT:PSS-PVA水凝胶应变传感器
基于PEDOT:PSS-PVA水凝胶的微相半分离网络,作者制备了应变传感器,并探究其传感特性。实验结果表明,该应变传感器的电阻响应的相应加载-卸载循环在高达300%的宽应变范围内表现出几乎为零的滞后(图 1e)。该应变传感器的应变系数 (GF)为 4.07,灵敏度良好,适用于一般传感的应用场景。该应变传感器的电阻变化和应变之间的具有出色的高线性(R2=0.98),这方便了传感器的校准和测量。除了高拉伸性之外,该应变传感器的电阻响应能够检测超低变形,如12 μm(0.05% 应变)。即使在高度拉伸的状态下(例如 100% 应变),这种微小的应变检测也可以以高分辨率连续区分(图 2a)。此外,该应变传感器在不同的拉伸状态下对施加的周期性载荷具有稳定的响应能力(图 2b)。该传感器在从60%加载到最大300%的升压应变时表现出优异的分段稳定性,并且在卸载到初始状态后没有明显的阻力变化(图 2c)。在2000次100%的加载-卸载循环中其传感性能和滞后性也没有显着下降(图 2d),这体现了该传感器出色的鲁棒性。最后,作者通过锤击或手动扭曲等离轴变形(图 2e f) 等实验验证了该传感器对压力和扭转干扰具有良好的不敏感和解耦变形能力。
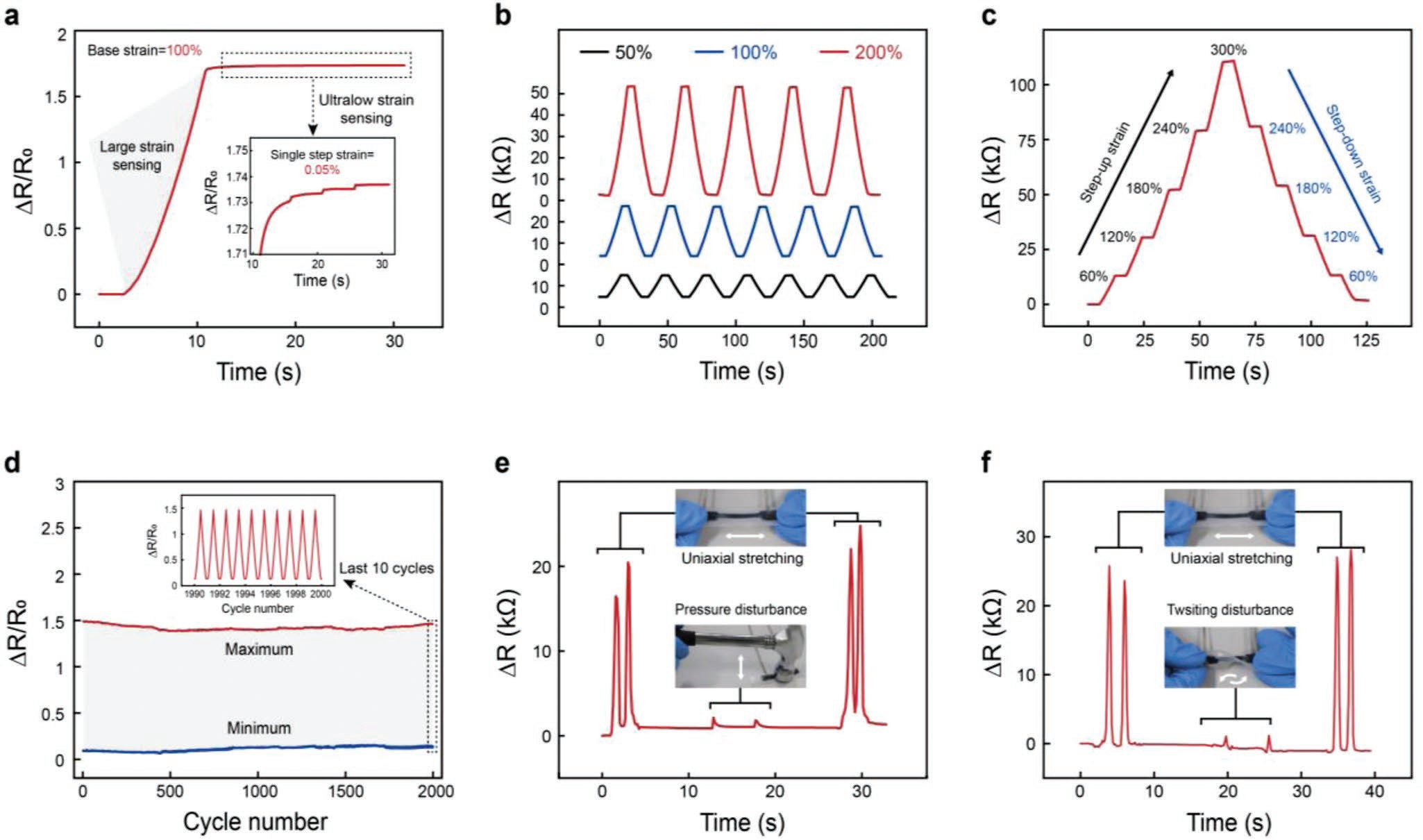
图2. PEDOT:PSS-PVA水凝胶应变传感器的传感特性
首先,作者将PEDOT:PSS-PVA水凝胶应变传感器应用于可穿戴电子皮肤,用来监测人体运动和生理信号。实验结果表明,该可穿戴电子皮肤对眨眼、吞咽和皱眉等细微变形能提供敏感响应(图 3a 和b)。从记录的阻力反应中,还可以检测到受试者的眨眼频率和咽喉吞咽的详细特征,并区分不同的面部表情,如不笑、微笑和咧嘴笑(图 3c)。该可穿戴电子皮肤还可以监测更复杂的生理信号,例如颈动脉脉搏波形和心率。接着,作者将该传感器应用于感官抓取和运动控制。实验结果表明,随着气压从0 kPa逐步增加到60 kPa,软夹具可以自主感知其弯曲角度(图 4a),该感官抓手还可以通过不同气压驱动下的应变变化自主区分抓取物体的大小(图 4b)。进一步的分析表明,传感器的归一化电阻变化随着供应的气压线性增加,并且软夹具可以根据相同气压下的传感信息区分加载和卸载条件(图 4c)。最后,作者将该传感器应用于工业机器人的手动远程控制(图 4d)。在应用中,应变传感器可以连续监测相应手指的弯曲运动。每个手指都经过预编程以控制工业机器人的一个运动方向。工业控制器根据自动识别的传感信号指示机器人的运动。实验结果表明,该PEDOT:PSS-PVA水凝胶应变传感器的超低滞后、稳定性能和高鲁棒性允许通过多个传感通道对工业机器人系统进行精确、可靠和实时的控制(图 4e)。
图3. 用于生理监测和手势识别的可穿戴电子皮肤
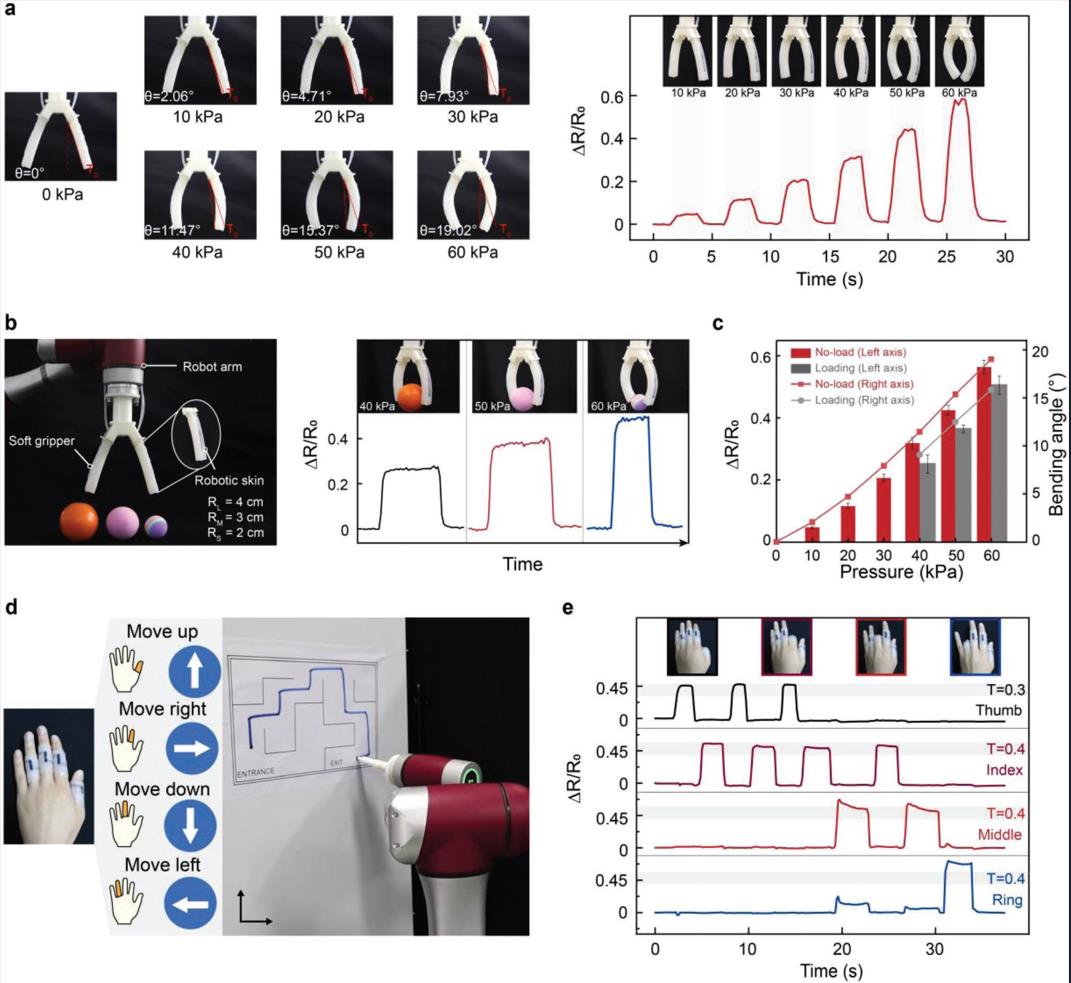
图4. 支持传感功能和远程控制的机器人皮肤
文章小结:
该项工作通过简单的一步合成方法,将PEDOT:PSS纳米纤维与聚乙烯醇 (PVA) 相结合,构建了独特的微相半分离导电聚合物水凝胶网络,开发了一种基于导电聚合物水凝胶的高度可拉伸(300%)、超低滞后(<1 .5%)的应变传感器,用于可穿戴皮肤和软机器人。该材料可通过直接墨水书写(DIW)3D打印和连续冻融来进行量产制造。该应变传感器具有高线性度、高机械循环稳定性以及抵抗诸如扭转和压力等离轴变形的内在鲁棒性。该项工作中的PEDOT:PSS-PVA水凝胶应变传感器的实际应用展现出了下一代柔性智能机器人的巨大潜力,也为具有增强传感功能的导电聚合物水凝胶和可拉伸电子皮肤及智能机器人系统提供了技术平台。
作者简介

卢宝阳,教授、硕导,山东大学博士、麻省理工学院博士后,“江西青年五四奖章”获得者,入选省“双千计划”科技创新高端人才(青年)项目、省主要学科学术与技术带头人培养计划、省杰出青年人才资助计划、省“百人远航工程”。曾荣获第五届中国青少年科技创新奖、全国优秀共青团员、中国大学生自强之星等荣誉。作为骨干成员获省自然科学奖一等奖1项、三等奖1项,省高校科技成果一等奖2项、三等奖1项。主要致力于柔性(可弯曲、可拉伸、自修复等)功能聚合物和其光电器件研究,及在能源转化、生物电子或环境传感等领域的应用。以第一、共同第一或通讯作者身份发表SCI收录论文70余篇,其中影响因子10以上5篇,影响因子5.0以上31篇,ESI热点论文1篇、高引论文2篇;与他人合作发表SCI收录论文50余篇;申请美国、中国发明专利30余项,授权发明专利10项。
论文链接:https://doi.org/10.1002/adma.202203650